Projects
-
MIDILoopPedal: A loop pedal for digital musical instruments
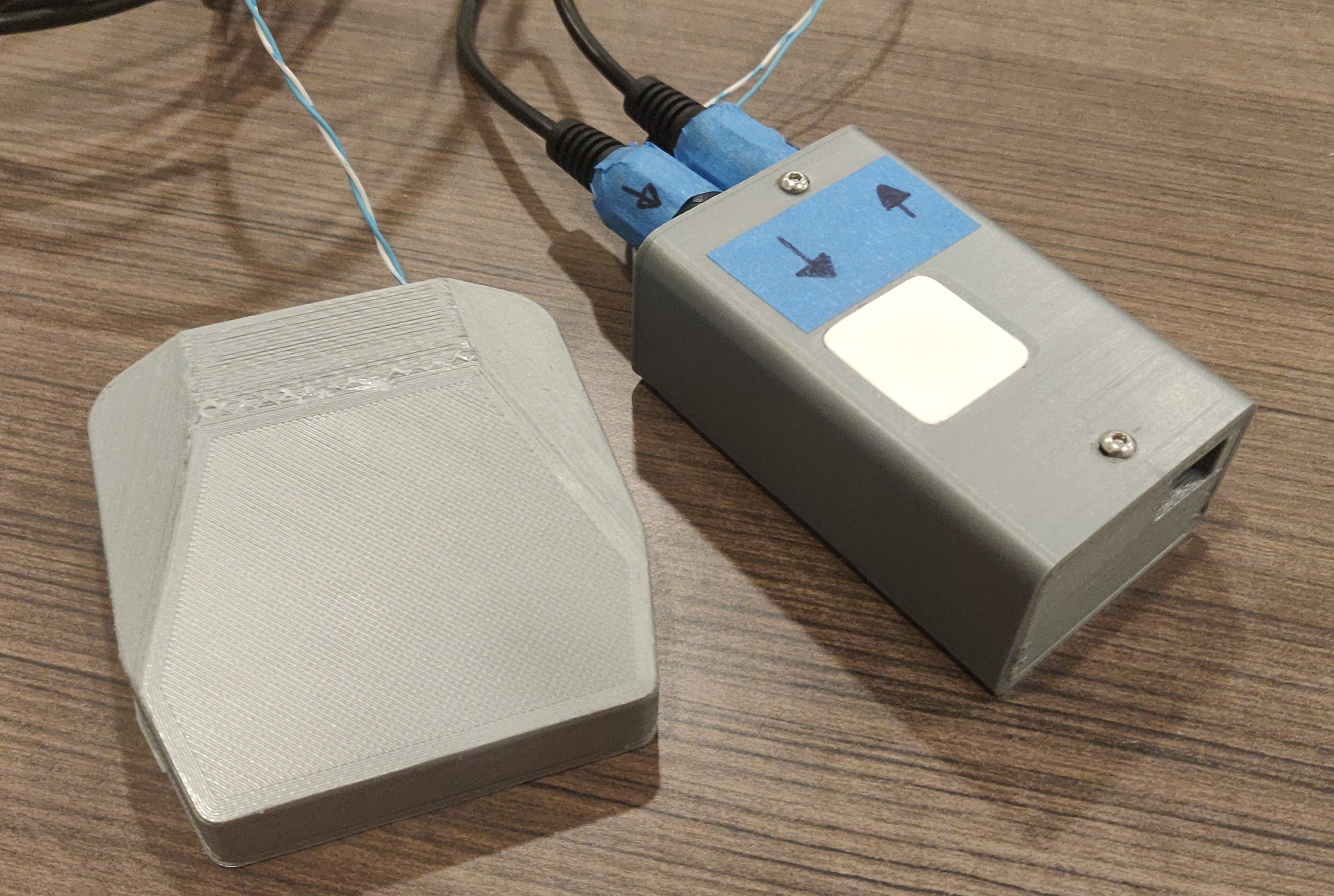
For an honors contract in EGR201, I am designing a loop pedal for digital musical instruments using the Musical Instrument Digital Interface protocol. This project enables a musician to record tracks which get automatically played back over top of the performance, for layering sounds.
-
FlipBot: An Orientation Agnostic Inspection Robot
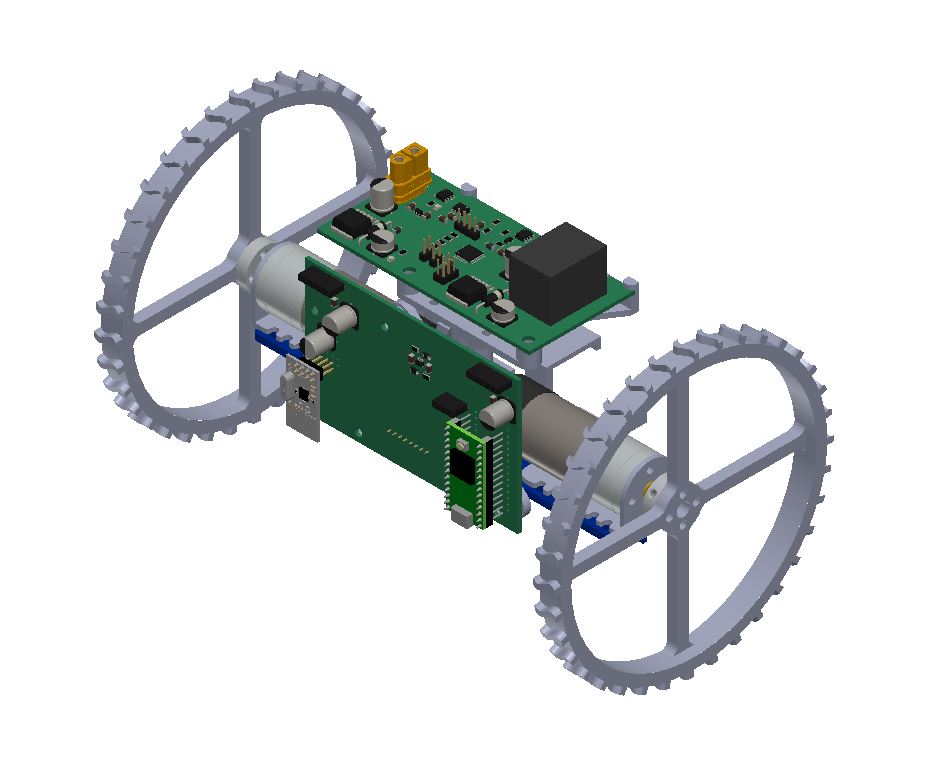
For an honors contract in EGR102, I designed a small two wheeled robot for inspection applications. It’s designed to be able to drive right side up and upside down, and integrates sensing to automatically reverse the controls when upside down. This project was an exploration into the journey of designing a complete integrated electrical, mechanical, and software robot system.
-
PowerMonitor: Modular Power Management for Small Robots
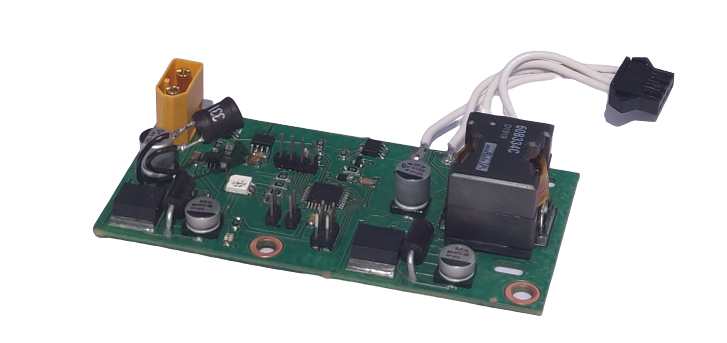
For an honors contract in EGR216, Electrical Fundamentals, I researched, designed, and built a power management board for small robotics applications. It uses modularized sensors and a state machine to track fault conditions and prevent damage to the robot and battery. This project was my first leap into the world of surface mount PCB design.
-
CLMC: Closed Loop Motor Controller

For a dual honors contract in EGR101, Foundations of Engineering Design Project I, and MAT265, Calculus for Engineers I, I researched, designed, and built a closed loop motor controller. This project used a PID loop to control the position, velocity, and acceleration of an attached motor. As my first foray into the world of PCB design, I used common building blocks to help simplify the design and ensure I was able to finish it within the time constraints of the semester.
-
Spin: Simple Volume Control

Spin is a low cost USB volume/mute control device based on the Adafruit Trinket M0. It grew out of the need to have an easy to access volume control during long Zoom meetings.
-
Autonomous Vehicles: The Viability of Moral and Legal Agency
For the conclusion of my senior year in high school, I spent the semester developing a thesis investigating the topic of liability in autonomous vehicles. This 28 page document below was the culmination of over five months of research and examines the issue through the moral and legal sectors, advocating for a legal agency model to provide representation for autonomous vehicles.